Cyber-Physical Vehicular and Transportation Systems
About
Cyber-physical vehicular and transportation systems, enabled by embedded sensing, computing, communication, control, and actuation technologies in the vehicles and infrastructure, offer new opportunities to monitor and control real-time traffic. With connected vehicle (CV) and automated vehicle (AV) technologies becoming increasingly mature and practical, Cooperative Driving Automation (CDA), as standardized by SAE J3216, aims at combining both technologies to enable real-time cooperation of equipped vehicles, other road users, and infrastructure to improve safety, mobility, environmental sustainability, situational awareness, and operational efficiency of traffic flow.
We work on Automated Driving Systems (ADS) and Cooperative Automated Driving Systems (C-ADS). We develop algorithms and perform simulation and field testing in the following areas. We are a key contributor/accelerator of the FHWA Cooperative Driving Automation (CDA) platform, CARMA.
- ADS/C-ADS design (system architecture)
- Cooperative perception
- Cooperative control
- Cooperative Traffic Management
- Multi-resolution simulation
- Field testing methodologies (e.g., scenario development, hardware-in-the-loop testing)
We are dedicated to real-time computation (particularly enabled by AI/ML and classical control theories) for cooperative driving automation, consisting of sensing (i.e. measurements about the environment made opportunistically or deliberately at select points in space-time), perception (i.e. determining the status, attributes, and dynamics of relevant elements in the environment), comprehension (i.e. integrating the preceding information into a world model with appropriate semantics), prediction (i.e. make predictions about future states and actions of the elements in the environment), decision-making (i.e. what actions to take for purposes of controlling the environment for the desired objective, as well as for purposes for exploration to learn more about the environment), and actuation (i.e. performing the actions onto the environment).
Below are our current areas of interest (AOI) in this research direction and related ongoing work. Please see our publications for more than 50 papers and reports on these topics.
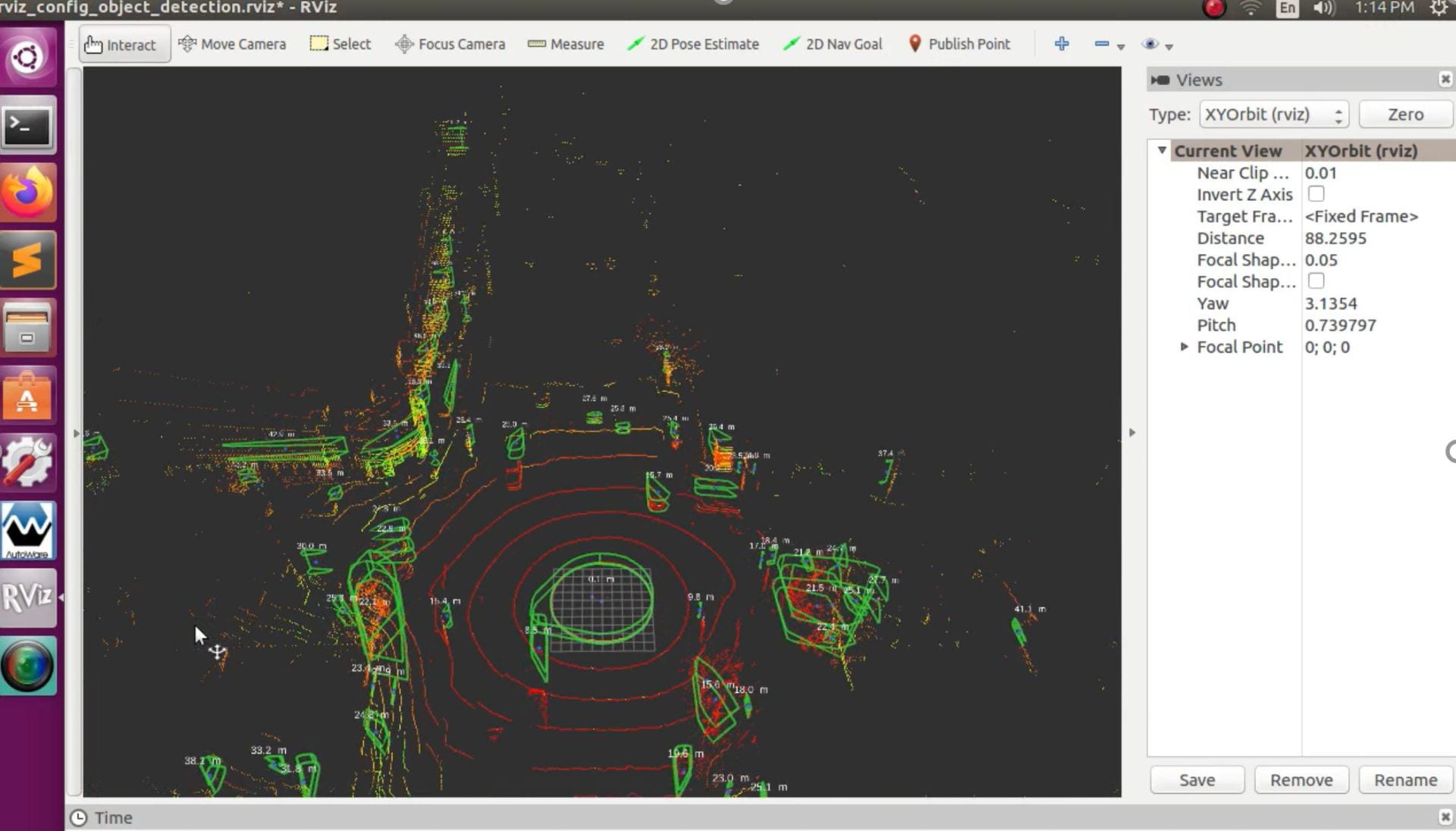
AOI 1 – Cooperative Perception
Vehicles and infrastructure elements engaged in cooperative automation may share information of their own and what they see, such as state (e.g., vehicle position, speed, and traffic signal phase) and intent (e.g., planned vehicle trajectory and traffic signal timing) and seek agreement on cooperative plans (e.g., intersection management, coordinated merge). Some of our current development aspects include:
- Fusing data from connected/automated vehicles and infrastructure detectors to estimate and predict detailed microscopic (e.g., unobserved vehicle location, speeds) and macroscopic (e.g., traffic speed and density at higher resolutions) traffic states and parameters via continual learning and online inference
- Creating more accurate dynamic world models by sharing vehicle processed sensor data from automated vehicles and infrastructure detectors under the constraints of uncertainty of mixed-autonomy traffic flow and line-of-sight sensor limits
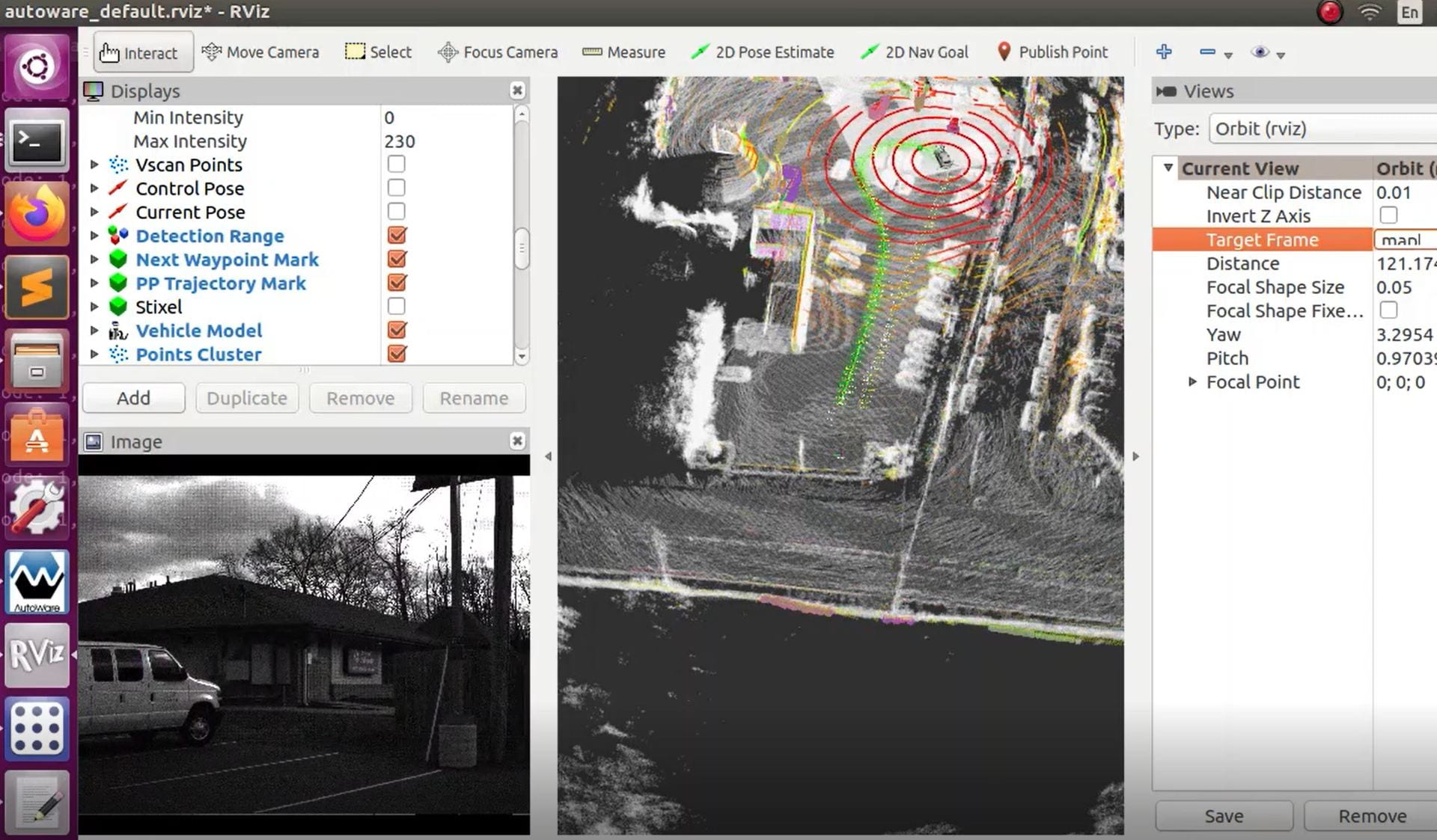
- Mapless automated driving – creating drivable maps online via combining sensor data and existing simplistic topological maps from the infrastructure


AOI 2 – Cooperative Control and Decision Making
We have worked a lot on ADS and C-ADS control, specifically: behavior planning, trajectory planning, and control, for the real-time optimization of local and system traffic performance. Our particular focuses include:
- Behavior and trajectory level control algorithms and protocols via classical optimal control and/or emerging reinforcement learning approaches (e.g., platooning, merge)
- Focusing on the key concept of smoothing of traffic by control from both the vehicle and infrastructure sides (e.g., traffic signals) to enhance system efficiency and reduce energy consumptions and emissions
- Stressing safety and security of control applications: we aim to develop controllers with safety performance guarantees
- Integration of perception and control (related to AOI 3) and enabling online learning within stringent real-time resources and deadlines
AOI 3 – Cooperative Driving Automation System Architecture
The system architecture of ADS and C-ADS is an open question that we have started to address. Conventional ADS systems, or any classical control, contain prespecified modules: plant, perception, and control. End-to-end approaches present another extreme alternative where no arbitrary architectural decisions are made a priori. Central to our focus on the architecture problem is the notion of state that allows us to fulfill the automated driving tasks and what the right objective or loss functions should be. We are also actively working on upgrading conventional ADS platforms with component-wise learned modules for decision making, planning, and control.


AOI 4 – Multi-Resolution Modeling and Simulation for ADS and C-ADS
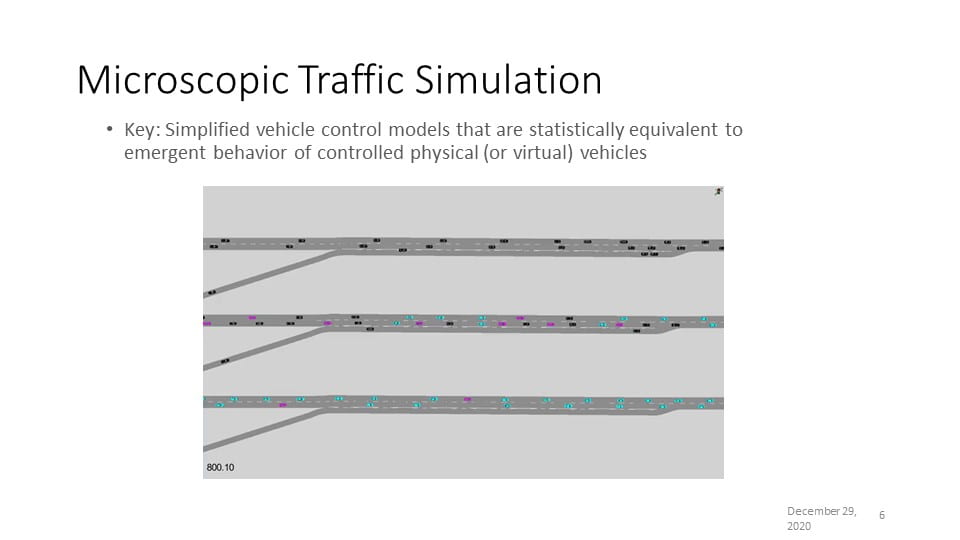
Simulation of different resolutions and scales have played a central role in our work for verification and validation of the algorithms and control software we developed for automated driving and cooperative driving automation. Our focus and interest include the following:
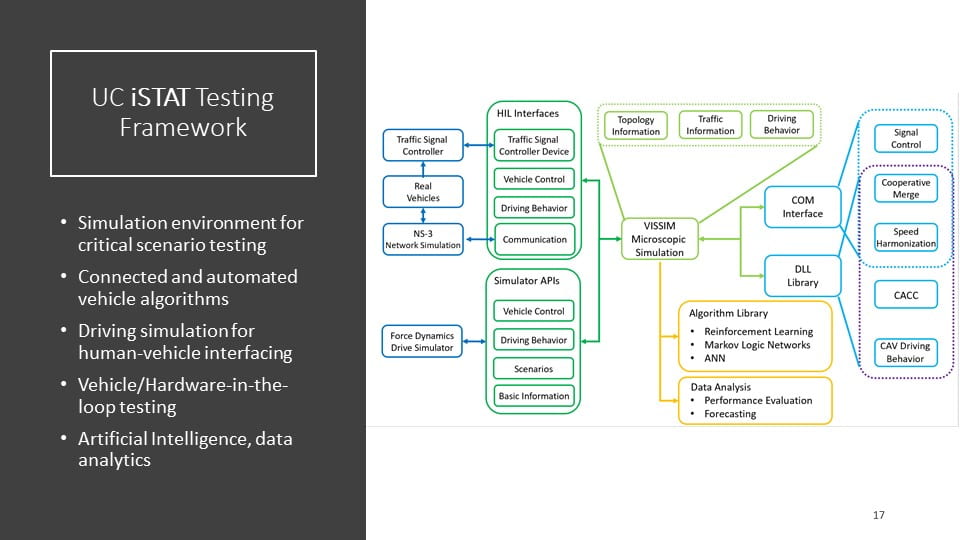
- Microscopic modeling and simulation connected automated vehicle behavior (i.e., simplified control logic) under different operational scenarios at different facilities. Tools used include SUMO, VISSIM, and APIs developed for automated driving.
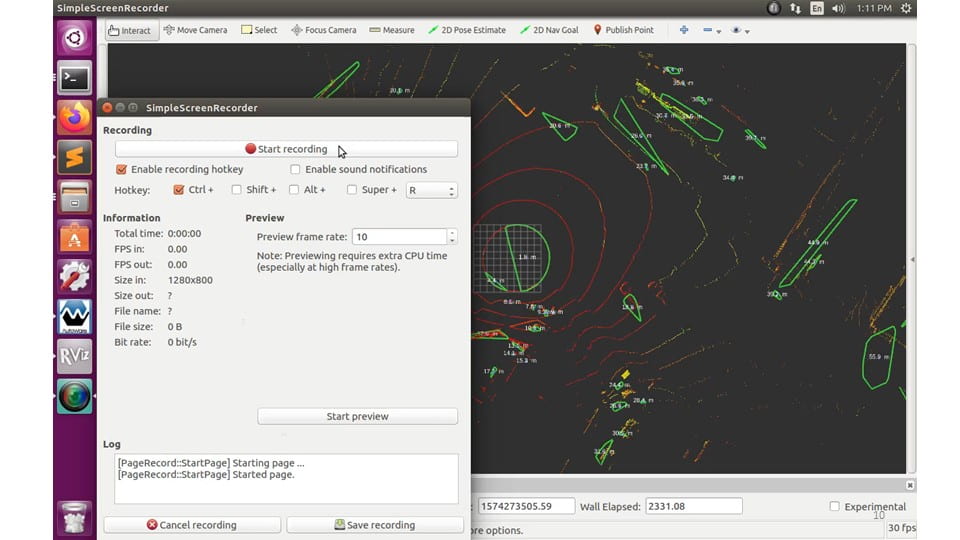
- Autonomous driving simulation (using AD simulators such as CARLA)
- Co-simulation methodologies, e.g., using CARLA + SUMO
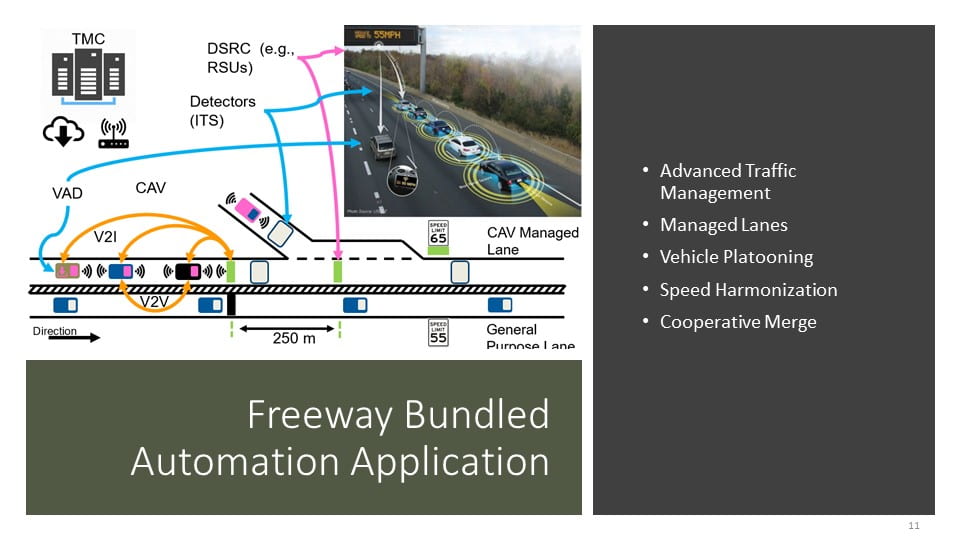
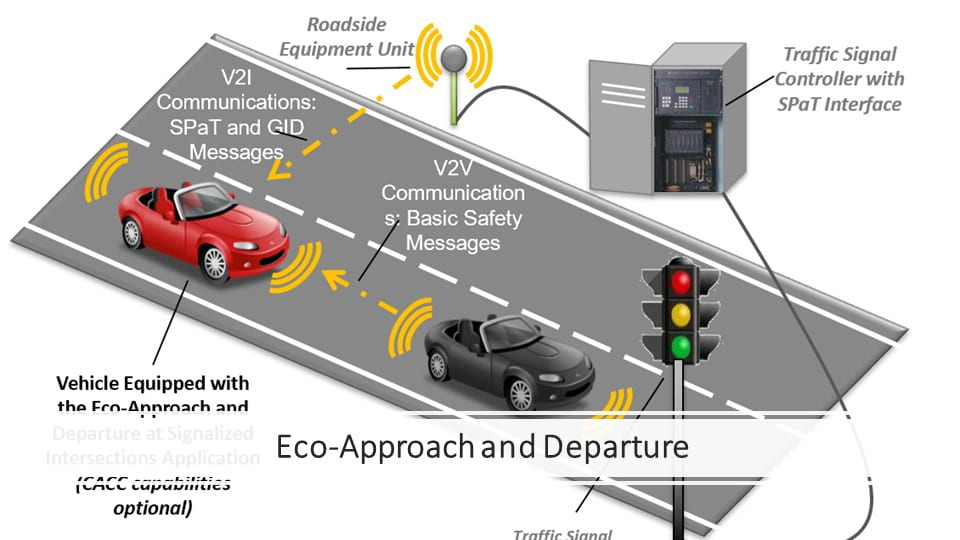
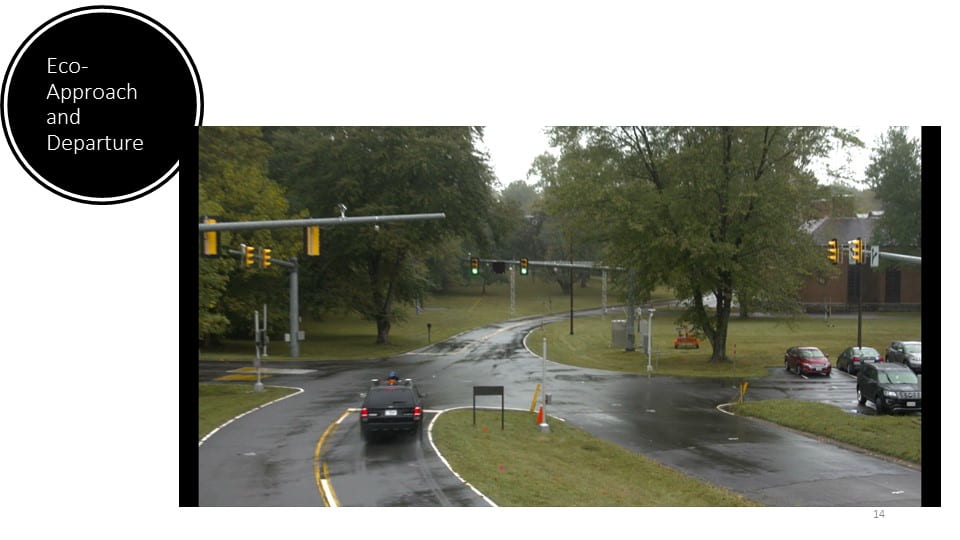
- CDA applications that have been simulated are platooning, cooperative merge, speed harmonization, signalized intersection approach and departure, and eco-driving. Models have been calibrated using field experimental data
- ADS functions (e.g., car-following, lane change, gap acceptance) have been developed as APIs
- Codes are being open-sourced on our Github site gradually
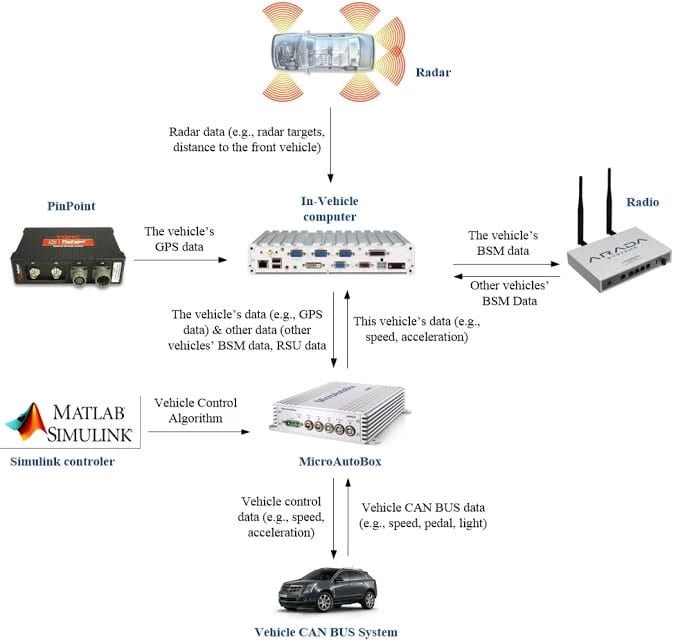
AOI 5 – Field Testing Methodologies and ADS Data
The literature of cooperative driving automation (or connected automated vehicles in general) has been simulation-driven in almost all the cases. One unique contribution of our team to the field is using full-scale automated vehicles and CDA prototypes to verify and validation algorithms and systems and collect data that can be utilized to calibrate simulation models of CDA vehicles. Also, we are specifically collecting data (to be open to the public) to understand how human drivers and automated vehicles interact with each other. Some specific areas of current focus of our team include:
- New testing methods, e.g., hardware/vehicle-in-the-loop, software-in-the-loop
- Scenario generation for testing various CDA applications
- Online and offline identification of driver characteristics and driver behavior modeling
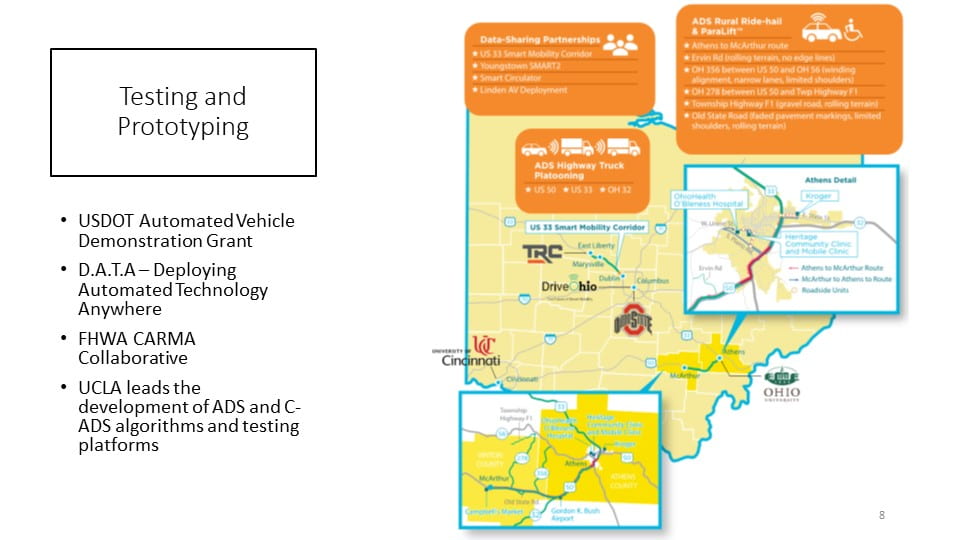
- Understanding safety and reliability of automated driving systems (thought one of the eight USDOT Automated Driving System Demonstration Projects)

Below are some miscellaneous random collection of slides and it is not guaranteed that all information are self-explanatory: